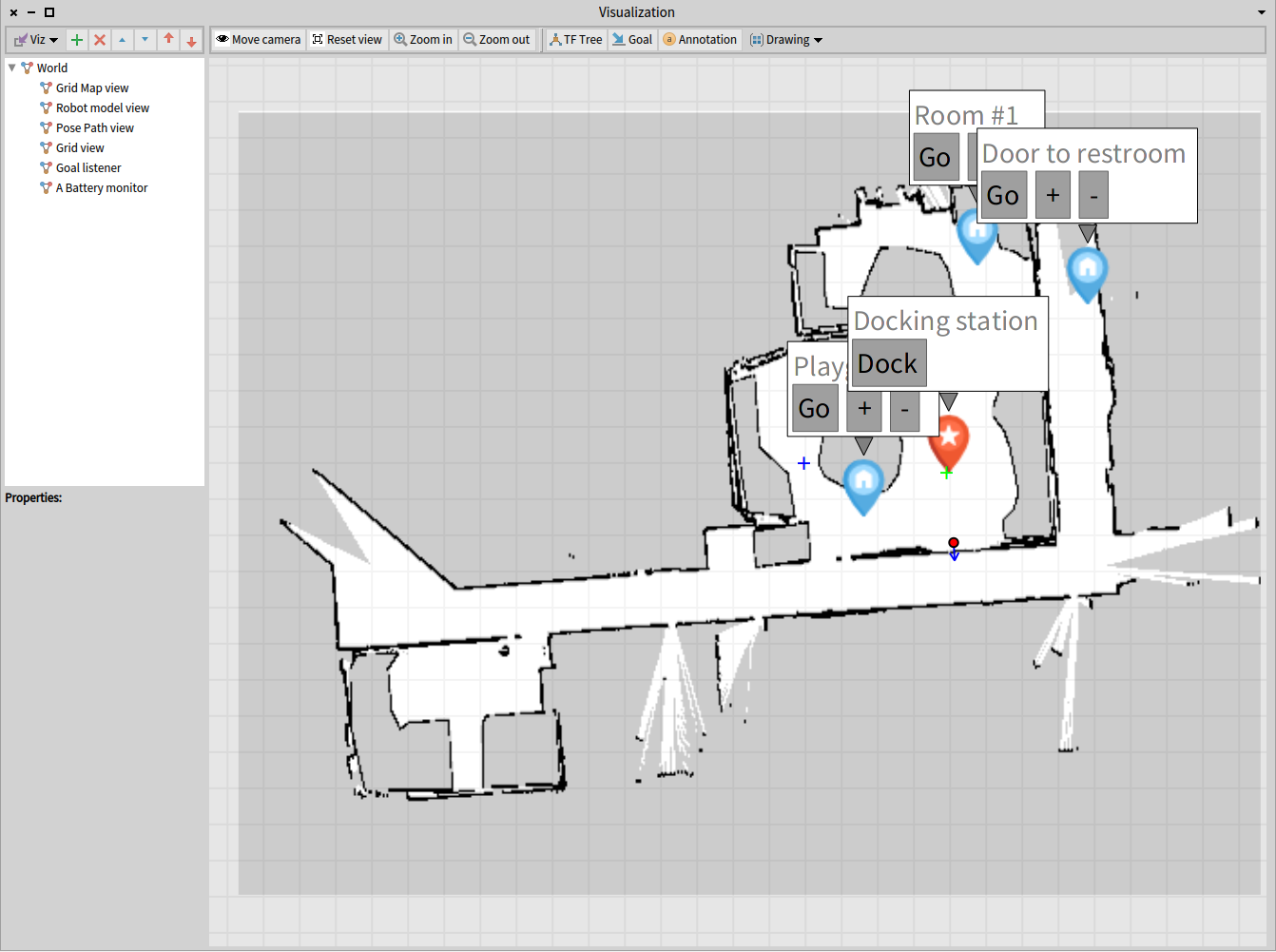
Controlling a Turtlebot using PhaROS: Goals planning and Automatic docking
This is a demonstration of my current work on controlling robot using ROS and PhaROS. For that task, I've developed a dedicated PhaROS package that defines:
- A base framework for ROS based visualization such as map, robot model, robot trajectory, etc.
- An Event-driven API for robot controlling
Install
For more information about PhaROS, please refer to this link: http://car.imt-lille-douai.fr/category/software/pharos/
To install the package on Pharo 7:
Metacello new
repository: 'github://lxsang/Galleon';
baseline:'Galleon';
load
Requirements
To use the package on real robot we need:
- A Turtlebot
- A URG-04LX-UG01 laser sensor
3.A Ros based navigation software stack, please refer to this post: https://blog.iohub.dev/setting-up-a-software-stack-for-autonomous-mono-robot-exploration-and-mapping-using-ros to set up a proper navigation stack
Running this demo
All the launch files for this demo are available at: https://github.com/lxsang/ROS-packages/tree/master/inria_demo
This demo uses the map of our lab building (previously built by the same robot), if you want to test on other environment, you need to create one first, then modify the navigating.launch file accordingly.
To run the demo, fist we run the navigation stack on the robot:
roslaunch inria_demo navigating.launch
Then we can interact with the robot on Pharo using the previously installed packages